Research

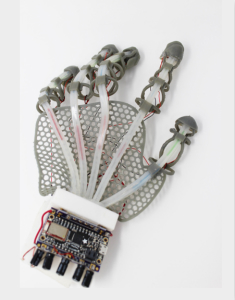
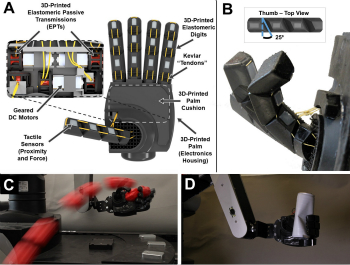
Wearable Robots
We develop, fabricate, and apply distributed sensor and actuator networks to assist in disease prevention, patient care, and patient rehabilitation.

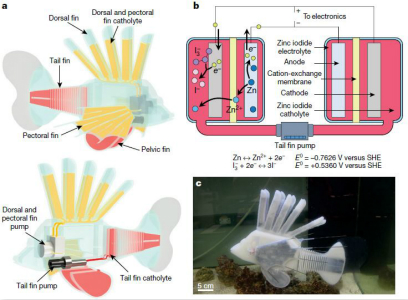
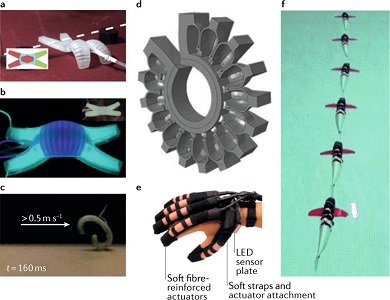
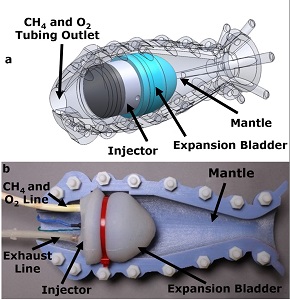
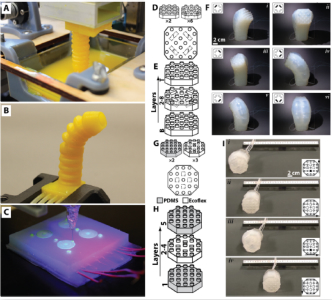
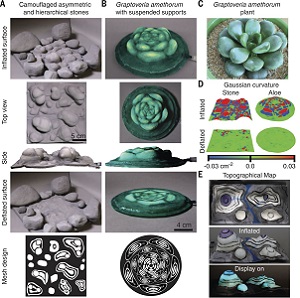
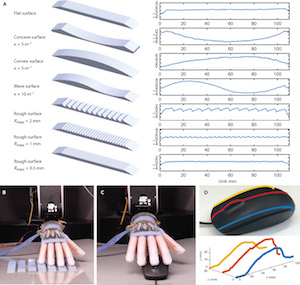
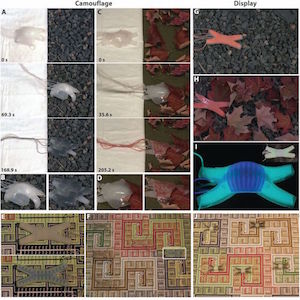
Bio-inspired Robots
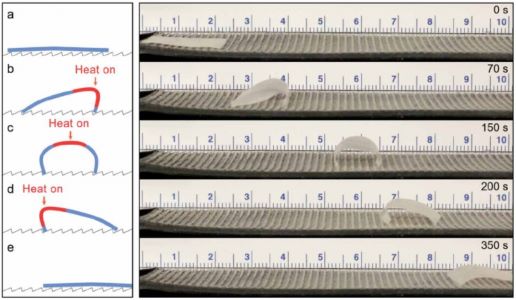
Our primary research thrust is the design, fabrication, and optimization of soft actuating systems for applications in robotics, agriculture, and human interface and assistive technologies.

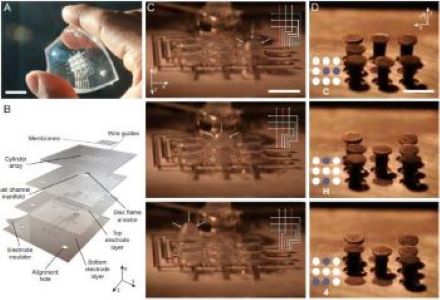
Advanced Manufacturing
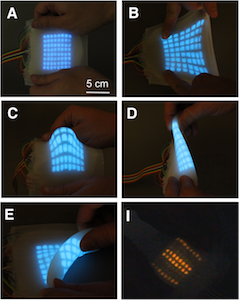
We develop advanced methods based on direct ink writing, digital mask projection stereolithography, conformal lithographyTM, and rotational molding to fabricate soft robots, wearable devices, displays, and sensors.